在保养老旧机器人车辆模块期间经常出现的典型情况是希望升级其传感器或驱动器。借助IMOR软件,现有类型的传感器、摄像头或驱动器的新型号可以轻松集成到软件中,通常无需重写这些正在使用的设备数据的任何高级代码。
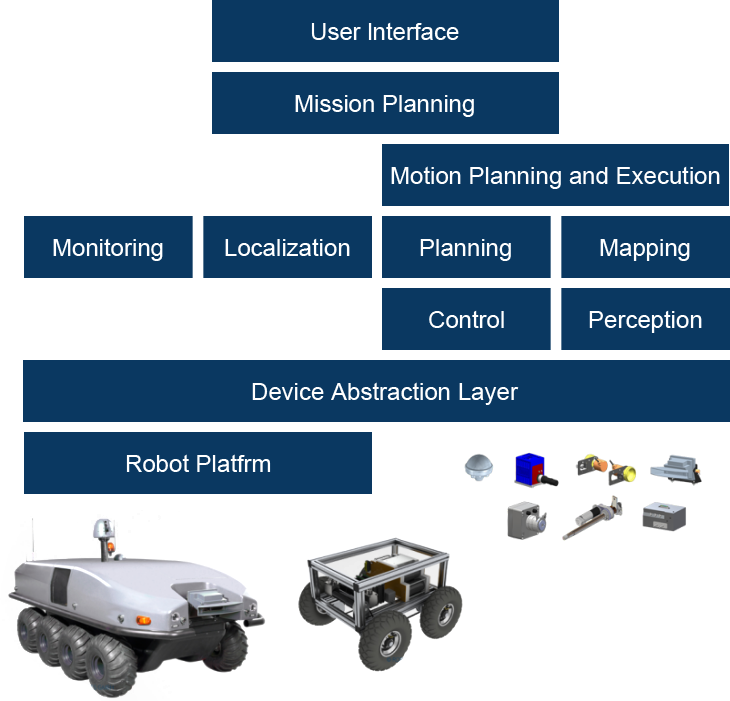
通过使用设备抽象层的强大功能,可以直接查询新设备,并且可以很容易地集成到整个软件中。 IMOR内部用于传感器值的缓冲和插值的先进设施,使得增加对新传感器的支持成为开发的家常便饭。
IMOR软件通过让机器人完成任务而实现它的意义。任务可以是不同的形式,例如自主巡逻、远程控制的排爆工作,或多辆车组成的自主车队。任务对象负责执行所有初始化和行动;它可以建立在自主导航、远程控制和其他设备的现有模块上,以再利用现有的功能。
IMOR软件基于任务的方法提供了必要的灵活性,可以将几乎所有的任务以合适的方式整合到软件中。作为更低级的操作,坐标转换几乎是IMOR所有模块的核心。一组C ++'类'允许对坐标系和变换进行简单和安全类型的操作。这些坐标系统使用在整个IMOR软件中,大大缩小了错误的范围。确保此C ++'模板'属性获得最佳性能。
经过现场验证的车辆,如Robowatch的模块化柴油动力车CHRYSOR或个人开发平台,成功地使用了IMOR软件
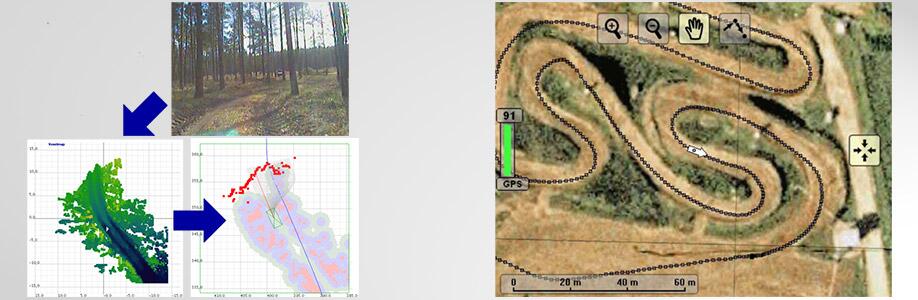
独立工作的多个模块以安全为重点,持续监测车辆的状况,例如电池充电、网络连接或车辆倾斜,以检测和避免危急情况。注意:特别危急情况由IMOR软件收集,用于通过TCP / IP接收数据并显示实时图像、机器人状态、地图数据等的用户接口客户端,例如机器人控制平台(单独提供)显示。还可以完全控制机器人,包括远程控制,并限定了自主导航的路径点。然而,IMOR网络协议是全面记录的,也可以被其他客户端使用。
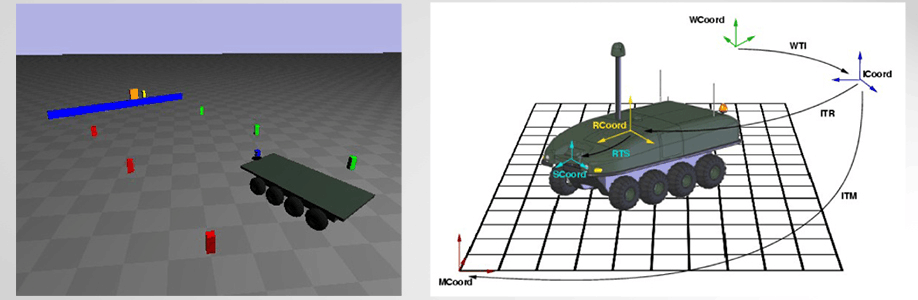
由于目前大多数开发项目都需要仿真以获得较短的开发周期,因此大多数IMOR组件都能够以仿真模式运行。IMOR集成了与工业和研究机构中使用的领先仿真框架一起工作的模块。其他仿真框架的集成也是可以实现的。
IMOR软件可以在注重低功耗的车辆上运行,它通常被部署运行在单一的800 MHz或更低的低功耗处理器系统中,但仍然提供与其他解决方案齐全的性能。通过集中精力,使用可靠经济的铅酸电池供电,IMOR软件能够让每天仅重25kg的机器人在无人看管情况下运行超过12小时。
IMOR软件只需要标准的Linux系统(如Fedora,SuSE或Ubuntu),就可以最优地整合用户的资源,而不需要专门的实时操作系统或其他性能要求。IMOR软件包含大约2000个清晰且精心编写的C ++源代码文件,总共包含超过25万行代码(不包括注释),全部完整的文档,包括示例代码。